Moment of Inertia
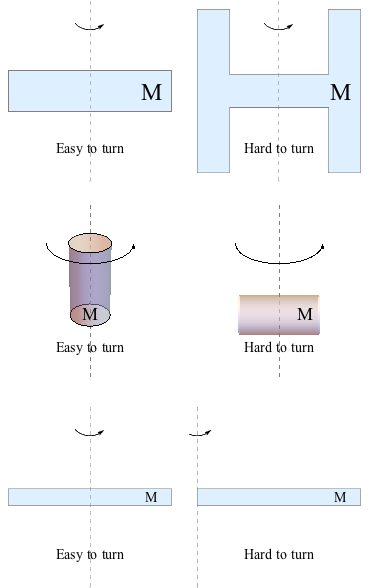
When it comes to translational motion, the idea of mass is fairly straightforward: heavy objects are harder to push. That's true in rotation too—a heavy object is harder to turn—but there's more to it than just heft. Both the shape of an object and the point it's rotating about are critical in figuring out how easy or hard it is to spin.
Mathematically, we describe the effect size and shape have on rotation with something called an object's moment of inertia, abbreviated I. Moment of inertia is a measure of how much inertia an object has—its resistance to, in this case, rotational motion. Big, heavy objects will have a high moment of inertia and be hard to turn; smaller, awkwardly shaped objects can also have high moments of inertia and can be just as hard to turn.
In a nutshell, the more mass an object has far away from the axis it rotates around, the more work it takes to turn it.
For a point mass orbiting a point a distance r away, its moment of inertia is:
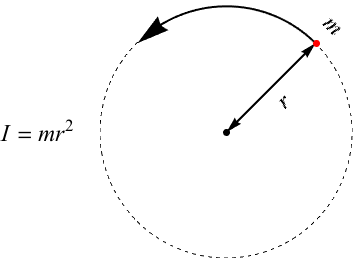
We measure moment of inertia in kg · m2, a weighted assessment of mass by distance.
If there are a whole bunch of point masses rotating, their collective moment of inertia is just the sum of all the object's individual moments of inertia:

By applying some calculus magic, we can take this sum-of-its-parts aspect of moment of inertia and figure out I for complicated rigid bodies, such as spheres or cylinders. Case in point for even the non-calculus inclined: the hula hoop.
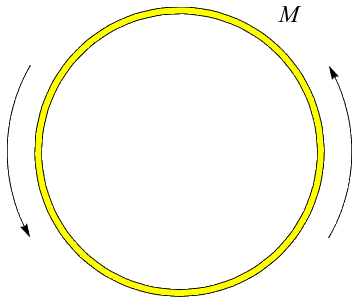
Imagine the hula hoop as made of very, very small chunks of hoop, each of mass m, and glued together:
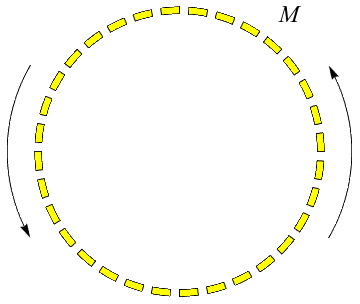
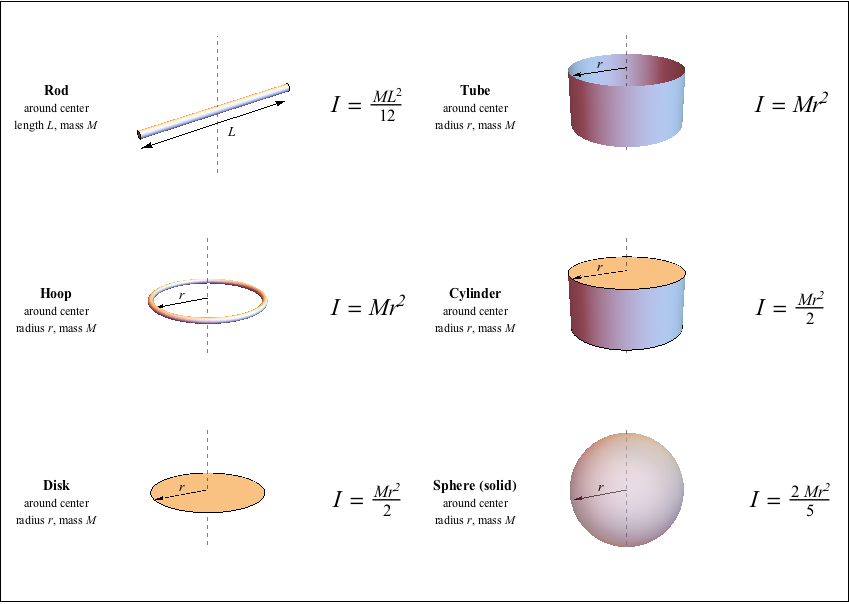
As you hula, each hoop chunk spins around at the same radius r (the radius of the hula hoop). Then each hoop chunk has a moment of inertia around this axis of rotation of Ichunk = mr2. The moment of inertia of the hoop is the sum of all the chunks: Ihoop = m1r2 + m2r2 + m3r2 + ...= Mr2, where is the overall mass of the hoop. The same process works for disks, rods, cubes—but the summation process is a little more involved. Here's a breakdown of some common shapes:
is the overall mass of the hoop. The same process works for disks, rods, cubes—but the summation process is a little more involved. Here's a breakdown of some common shapes:
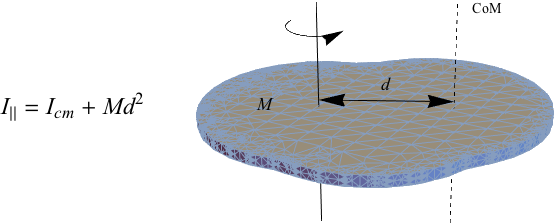 I|| is the new moment of inertia around the new axis of rotation, Icm is the original moment of inertia around the axis through the center of mass, M is the object's mass, and d is the distance between the old and new axes of rotation. Rotating around an axis that does not pass through the center of mass will always increase I—the Md 2 term can't be negative—because a different axis of rotation will always have more of the object's mass farther away than the axis through the center of mass.
I|| is the new moment of inertia around the new axis of rotation, Icm is the original moment of inertia around the axis through the center of mass, M is the object's mass, and d is the distance between the old and new axes of rotation. Rotating around an axis that does not pass through the center of mass will always increase I—the Md 2 term can't be negative—because a different axis of rotation will always have more of the object's mass farther away than the axis through the center of mass.
Common Mistakes
Remember the moments listed for common shapes are only true if the axis of rotation goes through the center of mass in the direction indicated. For an axis of rotation located at a different point (but in the same direction), we can use the parallel axis theorem to get the correct moment of inertia; for a different direction of rotation the moment of inertia may be completely different.
Brain Snack
While the parallel axis theorem has done a great job explaining moments of inertia for many simple and complex shapes, the one object's motion that has always eluded explanation by even the most astute physicists is Mick Jagger's gyrations around the axis of a microphone stand.
Mathematically, we describe the effect size and shape have on rotation with something called an object's moment of inertia, abbreviated I. Moment of inertia is a measure of how much inertia an object has—its resistance to, in this case, rotational motion. Big, heavy objects will have a high moment of inertia and be hard to turn; smaller, awkwardly shaped objects can also have high moments of inertia and can be just as hard to turn.
In a nutshell, the more mass an object has far away from the axis it rotates around, the more work it takes to turn it.
For a point mass orbiting a point a distance r away, its moment of inertia is:
We measure moment of inertia in kg · m2, a weighted assessment of mass by distance.
If there are a whole bunch of point masses rotating, their collective moment of inertia is just the sum of all the object's individual moments of inertia:
By applying some calculus magic, we can take this sum-of-its-parts aspect of moment of inertia and figure out I for complicated rigid bodies, such as spheres or cylinders. Case in point for even the non-calculus inclined: the hula hoop.
Imagine the hula hoop as made of very, very small chunks of hoop, each of mass m, and glued together:
As you hula, each hoop chunk spins around at the same radius r (the radius of the hula hoop). Then each hoop chunk has a moment of inertia around this axis of rotation of Ichunk = mr2. The moment of inertia of the hoop is the sum of all the chunks: Ihoop = m1r2 + m2r2 + m3r2 + ...= Mr2, where
is the overall mass of the hoop. The same process works for disks, rods, cubes—but the summation process is a little more involved. Here's a breakdown of some common shapes:Parallel Axis Theorem
If you remember all the way back to our discussion of momentum, you may have noticed that all of these moments of inertia are calculated around an axis of rotation that goes right through the object's center of mass. For a different rotation point of an object—say a rod rotating around one end, like a turnstile, instead of around its center—we use the parallel axis theorem to find the object's moment of inertia. The one catch is the new axis of rotation must be parallel to the axis through the center of mass. If that's the case, then:I|| is the new moment of inertia around the new axis of rotation, Icm is the original moment of inertia around the axis through the center of mass, M is the object's mass, and d is the distance between the old and new axes of rotation. Rotating around an axis that does not pass through the center of mass will always increase I—the Md 2 term can't be negative—because a different axis of rotation will always have more of the object's mass farther away than the axis through the center of mass.Common Mistakes
Remember the moments listed for common shapes are only true if the axis of rotation goes through the center of mass in the direction indicated. For an axis of rotation located at a different point (but in the same direction), we can use the parallel axis theorem to get the correct moment of inertia; for a different direction of rotation the moment of inertia may be completely different.
Brain Snack
While the parallel axis theorem has done a great job explaining moments of inertia for many simple and complex shapes, the one object's motion that has always eluded explanation by even the most astute physicists is Mick Jagger's gyrations around the axis of a microphone stand.